 My name is Mahra Alhosani and I am currently a second-year student on the master’s degree in Intelligent Robotic Systems (MIRS, 2024-2026). Looking back at my first year, I really appreciate how the programme is structured. The first semester had a significant theoretical load, but later I understood the reason: it provided me with the foundation I needed to survive a second semester that was much more demanding and practical.
My name is Mahra Alhosani and I am currently a second-year student on the master’s degree in Intelligent Robotic Systems (MIRS, 2024-2026). Looking back at my first year, I really appreciate how the programme is structured. The first semester had a significant theoretical load, but later I understood the reason: it provided me with the foundation I needed to survive a second semester that was much more demanding and practical.
During that practical semester, my team and I worked on four major projects using the TurtleBot platform:
To address the challenge of localisation, we implemented a real-time Graph SLAM system that fused odometry, IMU and LiDAR data. I learnt how EKF prediction, ICP scanning adjustment and iSAM2 combine to build a consistent trajectory. It was one of the toughest projects, but also one of the most rewarding ones.
In terms of exploration and planning, we developed a comprehensive frontier-based exploration system with global RRT * and MPPI planning for kineodynamic control. This project encouraged me to understand how robots can plan gentle and feasible trajectories while exploring unknown spaces.
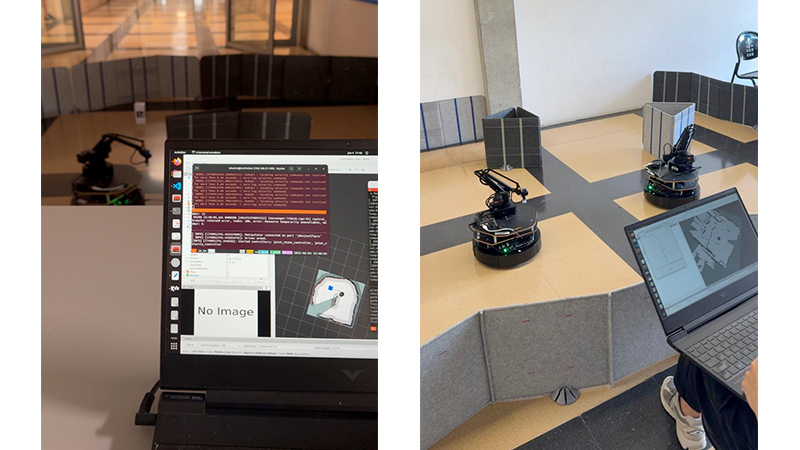
In the field of mobile manipulation,we built a complete collection and placement system (pick-and-place) using a manipulator assembled at TurtleBot. I worked on detecting ArUco markers, transformations of reference systems, control by task priority and a Behaviour Tree to coordinate the entire sequence. Seeing the robot collecting the box was like magic.
Finally, in the field of perception,we worked on estimating optic flow based on events through Maximising Contrast. It was the first time he worked with event cameras, hyper-parameter adjustment and performance comparison in different data sets. It really opened my eyes on how different perception is compared to the classic photogram-based vision.
These projects were not easy. Some days were purely debugging, and others were feeling that everything finally fits. But, in general, the structure of the master made sense: the theoretical semester prepared us for the practical, and the practical showed us what work in robotics really is like.
Now I am in the third semester, which is still in progress. This semester focuses on Machine Learning, Reinforcement Learning, and Object Detection and Segmentation. It is based on everything we learnt before, but now with a clearer focus on smart systems and AI. I like how the master’s degree does not just focus on robotics but also covers the part of smart decision-making, which is equally important.
In general, I feel that the MIRS programme has given me a very complete view of robotics: from SLAM to planning to manipulation, perception and, now, machine learning. It’s demanding, but in a good way: the type that forces you to grow.