 Me llamo Mahra Alhosani y actualmente soy estudiante de segundo curso del Máster en Sistemas Robóticos Inteligentes (MIRS, 2024-2026). Mirando atrás en mi primer año, valoro mucho como está estructurado el programa. El primer semestre tuvo una gran carga teórica, pero más tarde entendí el motivo: me dio la base que necesitaba para sobrevivir a un segundo semestre mucho más exigente y práctico.
Me llamo Mahra Alhosani y actualmente soy estudiante de segundo curso del Máster en Sistemas Robóticos Inteligentes (MIRS, 2024-2026). Mirando atrás en mi primer año, valoro mucho como está estructurado el programa. El primer semestre tuvo una gran carga teórica, pero más tarde entendí el motivo: me dio la base que necesitaba para sobrevivir a un segundo semestre mucho más exigente y práctico.
Durante aquel semestre práctico, mi equipo y yo trabajamos en cuatro grandes proyectos utilizando la plataforma TurtleBot:
Para abordar el reto de la localización, implementamos un sistema Graph SLAM en tiempo real que fusionaba datos de odometría, IMU y LiDAR. Aprendí como la predicción EKF, el ajuste de escaneo ICP y el iSAM2 se combinan para construir una trayectoria consistente. Fue uno de los proyectos más duros, pero también de los más gratificantes.
Con respecto a la exploración y la planificación, desarrollamos un sistema completo de exploración basado en fronteras (frontier-based) con planificación global RRT* y MPPI para el control cinodinámico. Este proyecto me impulsó a entender cómo los robots pueden planificar trayectorias suaves y factibles mientras exploran espacios desconocidos.
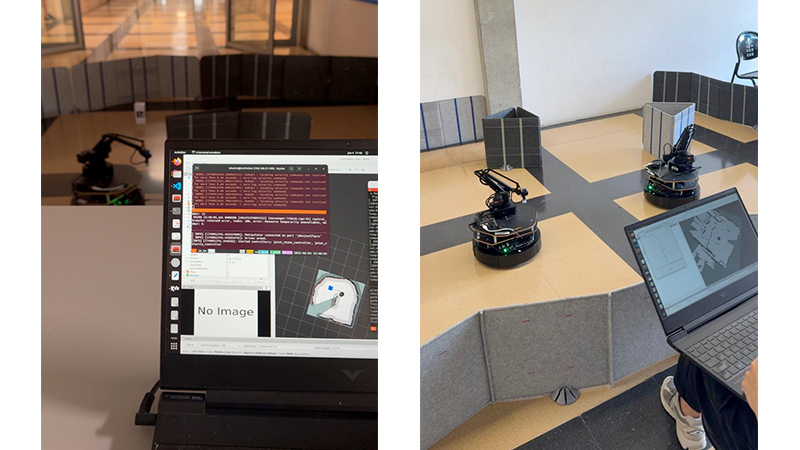
En el campo de la manipulación móvil, construimos un sistema completo de recogida y colocación (pick-and-place) utilizando un manipulador montado en el TurtleBot. Trabajé en la detección de marcadores ArUco, transformaciones de sistemas de referencia, control por prioridad de tareas y un Árbol de Comportamiento (Behavior Tree) para coordinar toda la secuencia. Ver el robot recoger la caja fue como magia.
Finalmente, en el ámbito de la percepción, trabajamos en la estimación de flujo óptico basado en acontecimientos mediante la Maximización del Contraste. Fue la primera vez que trabajaba con cámaras de acontecimientos, ajuste de hiperparámetros y comparación de rendimiento en diferentes conjuntos de datos. Realmente me abrió los ojos a como de diferente es la percepción con respecto a la visión clásica basada en fotogramas.
Estos proyectos no fueron fáciles. Algunos días eran puramente de depuración, y de otros sentías que finalmente todo encajaba. Pero, en general, la estructura del máster tenía sentido: el semestre teórico nos preparó para el práctico, y el práctico nos mostró cómo es realmente el trabajo en robótica.
Ahora estoy al tercer semestre, que todavía está en curso. Este semestre se orienta hacia el Aprendizaje Automático (Machine Learning), el Aprendizaje por Refuerzo (Reinforcement Learning) y la Detección y Segmentación de Objetos. Se basa en todo lo que aprendimos antes, pero ahora con un enfoque más marcado en sistemas inteligentes e IA. Me gusta que el máster no se centre solo en el hardware de la robótica, sino que también cubra la parte de la toma de decisiones inteligente, que es igual de importante.
En general, oigo que el programa MIRS me ha dado una visión muy completa de la robótica: desde SLAM y planificación hasta manipulación, percepción y, ahora, aprendizaje automático. Es exigente, pero en el buen sentido: del tipo que te obliga a crecer.