 Em dic Mahra Alhosani i actualment soc estudiant de segon curs del Màster en Sistemes Robòtics Intel·ligents (MIRS, 2024-2026). Mirant enrere al meu primer any, valoro molt com està estructurat el programa. El primer semestre va tenir una gran càrrega teòrica, però més tard en vaig entendre el motiu: em va donar la base que necessitava per sobreviure a un segon semestre molt més exigent i pràctic.
Em dic Mahra Alhosani i actualment soc estudiant de segon curs del Màster en Sistemes Robòtics Intel·ligents (MIRS, 2024-2026). Mirant enrere al meu primer any, valoro molt com està estructurat el programa. El primer semestre va tenir una gran càrrega teòrica, però més tard en vaig entendre el motiu: em va donar la base que necessitava per sobreviure a un segon semestre molt més exigent i pràctic.
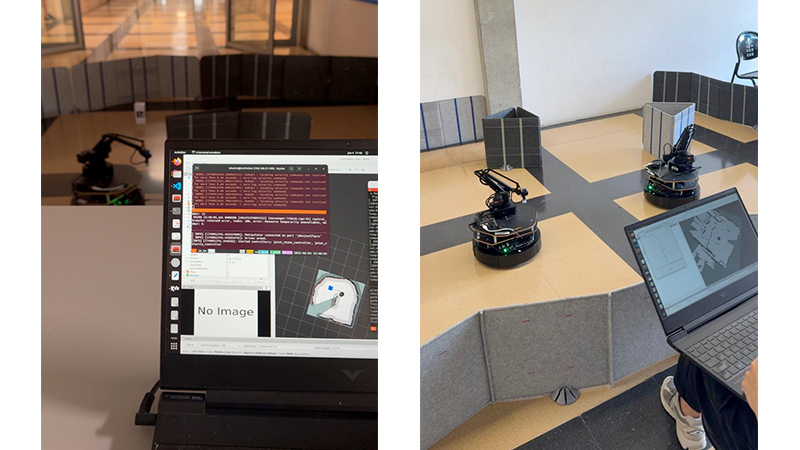
Durant aquell semestre pràctic, el meu equip i jo vam treballar en quatre grans projectes utilitzant la plataforma TurtleBot:
Per abordar el repte de la localització, vam implementar un sistema Graph SLAM en temps real que fusionava dades d'odometria, IMU i LiDAR. Vaig aprendre com la predicció EKF, l'ajust d'escaneig ICP i l'iSAM2 es combinen per construir una trajectòria consistent. Va ser un dels projectes més durs, però també dels més gratificants.
Pel que fa a l'exploració i la planificació, vam desenvolupar un sistema complet d'exploració basat en fronteres (frontier-based) amb planificació global RRT* i MPPI per al control cinodinàmic. Aquest projecte em va impulsar a entendre com els robots poden planificar trajectòries suaus i factibles mentre exploren espais desconeguts.
En el camp de la manipulació mòbil, vam construir un sistema complet de recollida i col·locació (pick-and-place) utilitzant un manipulador muntat al TurtleBot. Vaig treballar en la detecció de marcadors ArUco, transformacions de sistemes de referència, control per prioritat de tasques i un Arbre de Comportament (Behavior Tree) per coordinar tota la seqüència. Veure el robot recollir la capsa va ser com màgia.
Finalment, en l'àmbit de la percepció, vam treballar en l'estimació de flux òptic basat en esdeveniments mitjançant la Maximització del Contrast. Va ser la primera vegada que treballava amb càmeres d'esdeveniments, ajust d'hiperparàmetres i comparació de rendiment en diferents conjunts de dades. Realment em va obrir els ulls a com de diferent és la percepció respecte a la visió clàssica basada en fotogrames.
Aquests projectes no van ser fàcils. Alguns dies eren purament de depuració, i d'altres senties que finalment tot encaixava. Però, en general, l'estructura del màster tenia sentit: el semestre teòric ens va preparar per al pràctic, i el pràctic ens va mostrar com és realment el treball en robòtica.
Ara estic al tercer semestre, que encara està en curs. Aquest semestre s'orienta cap a l'Aprenentatge Automàtic (Machine Learning), l'Aprenentatge per Reforç (Reinforcement Learning) i la Detecció i Segmentació d'Objectes. Es basa en tot el que vam aprendre abans, però ara amb un enfocament més marcat en sistemes intel·ligents i IA. M'agrada que el màster no se centri només en el hardware de la robòtica, sinó que també cobreixi la part de la presa de decisions intel·ligent, que és igual d'important.
En general, sento que el programa MIRS m'ha donat una visió molt completa de la robòtica: des de SLAM i planificació fins a manipulació, percepció i, ara, aprenentatge automàtic. És exigent, però en el bon sentit: del tipus que t'obliga a créixer.